English version

![]() Start rakiety Proton wynoszącej satelitę ExoMars z Bajkonuru nastąpił 14 marca 2016. Sonda TGO weszła na orbitę Marsa w październiku 2016 zgodnie z założeniami. Obecnie sonda TGO porusza się po orbicie eliptycznej 240 km x 100 000 km od powierzchni Marsa. Docelowo będzie okrążać Czerwoną Planetę na orbicie kołowej oddalonej 400 km od powierzchni Marsa oraz nachyleniu orbity wynoszącym 74 stopnie. Obserwacje naukowe przyrządów rozpoczną się nie wcześniej niż w maju 2017 (w zależności od rzeczywistego czasu trwania fazej aerodynamicznej na powierzchni Marsa) i będą trwały przez cały rok marsjański.
Start rakiety Proton wynoszącej satelitę ExoMars z Bajkonuru nastąpił 14 marca 2016. Sonda TGO weszła na orbitę Marsa w październiku 2016 zgodnie z założeniami. Obecnie sonda TGO porusza się po orbicie eliptycznej 240 km x 100 000 km od powierzchni Marsa. Docelowo będzie okrążać Czerwoną Planetę na orbicie kołowej oddalonej 400 km od powierzchni Marsa oraz nachyleniu orbity wynoszącym 74 stopnie. Obserwacje naukowe przyrządów rozpoczną się nie wcześniej niż w maju 2017 (w zależności od rzeczywistego czasu trwania fazej aerodynamicznej na powierzchni Marsa) i będą trwały przez cały rok marsjański.
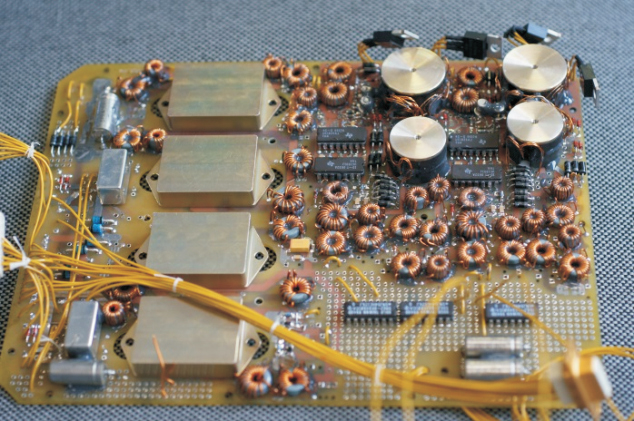
![]() W CBK PAN został zaprojektowany i wykonany moduł zasilania do kamery CaSSIS. Pierwsze modele bloku zasilania zostały w całości wyprodukowane i przetestowane w CBK, egzeplarz lotny (Flight Model) był wyprodukowany i wstępnie przetestowany w Creotech Instruments z wykorzystaniem uruchomionej w CTI i ceryfikowanej przez ESA linii montażowej. Finalne testy oraz integracja z resztą kamery zostały przeprowadzone przez CBK.
W CBK PAN został zaprojektowany i wykonany moduł zasilania do kamery CaSSIS. Pierwsze modele bloku zasilania zostały w całości wyprodukowane i przetestowane w CBK, egzeplarz lotny (Flight Model) był wyprodukowany i wstępnie przetestowany w Creotech Instruments z wykorzystaniem uruchomionej w CTI i ceryfikowanej przez ESA linii montażowej. Finalne testy oraz integracja z resztą kamery zostały przeprowadzone przez CBK.
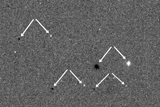
![]() 7 kwietnia 2016 kamera CaSSIS umieszczona na orbiterze TGO została włączona po raz pierwszy od momentu startu sondy i zarejestrowała pierwsze zdjęcia, patrząc w kierunku południowego bieguna niebieskiego. Rysunek obok przedstawia nałożone na siebie dwa obrazy wykonane w dwóch różnych pozycjach obiektywu kamery. Potwierdza to, że kamera i system pozycjonujący pracują poprawnie. Głównym celem instrumentu CASSiS jest dokonanie charakterystyki obszarów powierzchni Marsa, które mogą być potencjalnym źródłem gazów śladowych. Obserwacje uzupełnią w ten sposób dane uzyskane przez inne instrumenty znajdujące się na pokładzie sondy TGO.
7 kwietnia 2016 kamera CaSSIS umieszczona na orbiterze TGO została włączona po raz pierwszy od momentu startu sondy i zarejestrowała pierwsze zdjęcia, patrząc w kierunku południowego bieguna niebieskiego. Rysunek obok przedstawia nałożone na siebie dwa obrazy wykonane w dwóch różnych pozycjach obiektywu kamery. Potwierdza to, że kamera i system pozycjonujący pracują poprawnie. Głównym celem instrumentu CASSiS jest dokonanie charakterystyki obszarów powierzchni Marsa, które mogą być potencjalnym źródłem gazów śladowych. Obserwacje uzupełnią w ten sposób dane uzyskane przez inne instrumenty znajdujące się na pokładzie sondy TGO.
![]() "Pierwsze włączenie kamery nastąpiło bez żadnych trudności i jesteśmy zadowoleni z uzyskanych wyników," powiedział prof. Nicolas Thomas, szef projektu CaSSIS. "Chociaż kamera nie została zaprojektowana w celu obserwacji gwiazd, to pierwsze uzyskane obrazy dodają nam otuchy. Wszystko wskazuje na to, że jesteśmy w stanie uzyskać dobre dane na Marsie." Po wejściu na orbitę Marsa, kamera będzie prowadziła badania właściwości jego powierzchni, m.in. takie, które mogą być związane z istniejącymi źródłami gazu typu wulkany.
"Pierwsze włączenie kamery nastąpiło bez żadnych trudności i jesteśmy zadowoleni z uzyskanych wyników," powiedział prof. Nicolas Thomas, szef projektu CaSSIS. "Chociaż kamera nie została zaprojektowana w celu obserwacji gwiazd, to pierwsze uzyskane obrazy dodają nam otuchy. Wszystko wskazuje na to, że jesteśmy w stanie uzyskać dobre dane na Marsie." Po wejściu na orbitę Marsa, kamera będzie prowadziła badania właściwości jego powierzchni, m.in. takie, które mogą być związane z istniejącymi źródłami gazu typu wulkany.
![]() Szefem (Principal Investigator - PI) projektu CaSSIS jest Prof.Nicolas Thomas z Uniwersytetu w Bern w Szwajcarii. W przygotowaniu projektu uczestniczyły ośrodki ze Szwajcarii, Włoch i Polski.
Szefem (Principal Investigator - PI) projektu CaSSIS jest Prof.Nicolas Thomas z Uniwersytetu w Bern w Szwajcarii. W przygotowaniu projektu uczestniczyły ośrodki ze Szwajcarii, Włoch i Polski.
![]() W 2014 został podpisany kontrakt między ESA i CBK PAN (pierwszy kontrakt w historii CBK PAN w ramach programu PRODEX) na budowę modułu zasilania do instrumentu CaSSIS. W połowie roku model EM zasilacza PSU/CASSIS/TGO/ExoMars został przekazany do Szwajcarii do integracji z całym instrumentem. W dalszej części roku były kontynuowane prace nad modelem EQM zasilacza.
W 2014 został podpisany kontrakt między ESA i CBK PAN (pierwszy kontrakt w historii CBK PAN w ramach programu PRODEX) na budowę modułu zasilania do instrumentu CaSSIS. W połowie roku model EM zasilacza PSU/CASSIS/TGO/ExoMars został przekazany do Szwajcarii do integracji z całym instrumentem. W dalszej części roku były kontynuowane prace nad modelem EQM zasilacza.
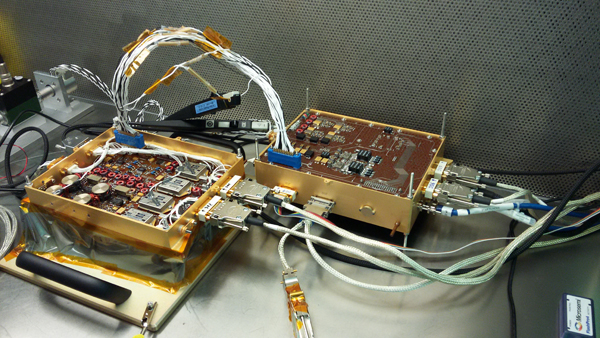
![]() W 2015 roku ukończono w naszym laboratorium model lotny bloku zasilania i w sierpniu został on przekazany do Szwajcarii do integracji z innymi podsystemami lotnymi modułu elektroniki (na fotografii po lewej stronie). Na jesieni przeprowadzona została integracja całego systemu lotnego instrumentu CaSSIS, który następnie poddany był intensywnym testom (m.in. funkcjonalnym, temperaturowym, mechanicznym). Montaż i końcowa integracja CaSSISa oraz pozostałej aparatury naukowej na orbiterze TGO odbywała się w laboratoriach Thales Alenia Space w Cannes we Francji. W końcu grudnia 2015 instrument razem z satelitą został dostarczony na poligon w Bajkonurze do integracji na rosyjskiej rakiecie Proton.
W 2015 roku ukończono w naszym laboratorium model lotny bloku zasilania i w sierpniu został on przekazany do Szwajcarii do integracji z innymi podsystemami lotnymi modułu elektroniki (na fotografii po lewej stronie). Na jesieni przeprowadzona została integracja całego systemu lotnego instrumentu CaSSIS, który następnie poddany był intensywnym testom (m.in. funkcjonalnym, temperaturowym, mechanicznym). Montaż i końcowa integracja CaSSISa oraz pozostałej aparatury naukowej na orbiterze TGO odbywała się w laboratoriach Thales Alenia Space w Cannes we Francji. W końcu grudnia 2015 instrument razem z satelitą został dostarczony na poligon w Bajkonurze do integracji na rosyjskiej rakiecie Proton.

![]() Drugim modułem misji ExoMars 2016 był lądownik Schiaparelli, który został zaplanowany jako pojazd demonstrujący zdolności przemysłu europejskiego do wykonywania kontrolowanego lądowania na powierzchni Marsa. Schiaparelli miał umożliwić badanie kluczowych technologii, które mogą być wykorzystane przez ESA w kolejnych misjach na Marsa. Trzy dni przed wejściem w atmosfere Marsa, lądownik Schiaparelli oddzielił się od orbitera i wszedł w stan hibernacji. Podsystemy lądownika były ponownie aktywowane 19 października 2016 parę godzin wcześniej przed wejściem w atmosferę - na wysokości 122 km nad powierzchnią planety i przy prędkości około 21 000 km/godz. Dzięki wykorzystaniu specjalnych spadochronów prędkość opadania została zmniejszona do 1650 km/godz. na wysokości 11 km, a następnie włączony aktywny system hamowania miał spowolnić ruch modułu do 15 km/godz. (4 m/s). Lądowanie przewidziane było w rejonie Meridani Planum. Niestety, podczas procedury lądowania 15 sekund przed osiągnięciem powierzchni, stracono kontakt z modułem Schiaparelli. Na fotografii po prawej stronie przedstawiony jest moduł lądownika zainstalowany przed startem na górnej części orbitera TGO (Credit: ESA).
Drugim modułem misji ExoMars 2016 był lądownik Schiaparelli, który został zaplanowany jako pojazd demonstrujący zdolności przemysłu europejskiego do wykonywania kontrolowanego lądowania na powierzchni Marsa. Schiaparelli miał umożliwić badanie kluczowych technologii, które mogą być wykorzystane przez ESA w kolejnych misjach na Marsa. Trzy dni przed wejściem w atmosfere Marsa, lądownik Schiaparelli oddzielił się od orbitera i wszedł w stan hibernacji. Podsystemy lądownika były ponownie aktywowane 19 października 2016 parę godzin wcześniej przed wejściem w atmosferę - na wysokości 122 km nad powierzchnią planety i przy prędkości około 21 000 km/godz. Dzięki wykorzystaniu specjalnych spadochronów prędkość opadania została zmniejszona do 1650 km/godz. na wysokości 11 km, a następnie włączony aktywny system hamowania miał spowolnić ruch modułu do 15 km/godz. (4 m/s). Lądowanie przewidziane było w rejonie Meridani Planum. Niestety, podczas procedury lądowania 15 sekund przed osiągnięciem powierzchni, stracono kontakt z modułem Schiaparelli. Na fotografii po prawej stronie przedstawiony jest moduł lądownika zainstalowany przed startem na górnej części orbitera TGO (Credit: ESA).